Best Software for 3D Rendering
In the rapidly evolving world of digital design, 3D rendering stands as a cornerstone, transforming concepts into visual masterpieces. From…
Graphical modeling software reviews


Welcome to my blog! I am happy to welcome you to this creative corner of the internet, where we will be exploring the world of graphic modeling. In this blog, I will share with you reviews of graphic modeling software that will help you bring your ideas to life and…

Graphical models are intended to provide a concise description of possibly complex relationships between a set of variables. In addition,…
The peculiarity of the method of graphical modeling is that the object is studied not directly, but through another object,…

3D modeling is a technique for creating a digital 3D image of an object or surface. The developer uses special…
Head over to the contact page!

The educational website on Moon Facts provides a online assignment help for university students with learning phases of the Moon, graphical modelling the Moon orbit, Moon's surface features. Learn more facts about Earth's only natural satellite.
Oxagile stands out as a pioneering developer of video streaming platforms with their decades-long expertise. Leveraging cutting-edge technology and in-depth industry knowledge, Oxagile's smart TV developers ensure seamless streaming, enhancing user engagement and satisfaction across various devices.
Keep2Share provides user-controlled encrypted cloud storage that’s accessed with web browsers and dedicated apps for mobile devices. Unlike other cloud storage providers, user data is encrypted and decrypted by client devices only.
Need to visualize your product modeling projects? Omega Render offers 3D product services for architects, designers, and developers. We're creating a powerful non-existent reality.

Discover a new way to view profiles with our Instagram Anonymous service, offering a unique Insta viewer experience without compromising your identity. Dive deep into any profile without revealing who you are, and enjoy the full experience of Instagram in an anonymous manner. Trust our platform for discreet and reliable Insta viewer sessions anytime, anywhere.

InternetDesign.sg is the best web design agency in Singapore. Their expertise lies in pairing UX design with data driven methodology to deliver the best performance in the field of web design in Singapore.
LeadFlowExperts.com is a dynamic website dedicated to providing in-depth reviews and valuable insights into the world of lead management software. With a focus on assisting businesses in optimizing their lead generation and conversion processes, this platform has established itself as a trusted resource for professionals seeking the right tools for their sales and marketing endeavors.
Experience the pinnacle of craftsmanship with 3D rendering services at Fortes Vision, where every artistic 3D visualization is a masterpiece that transforms your vision into a captivating reality.
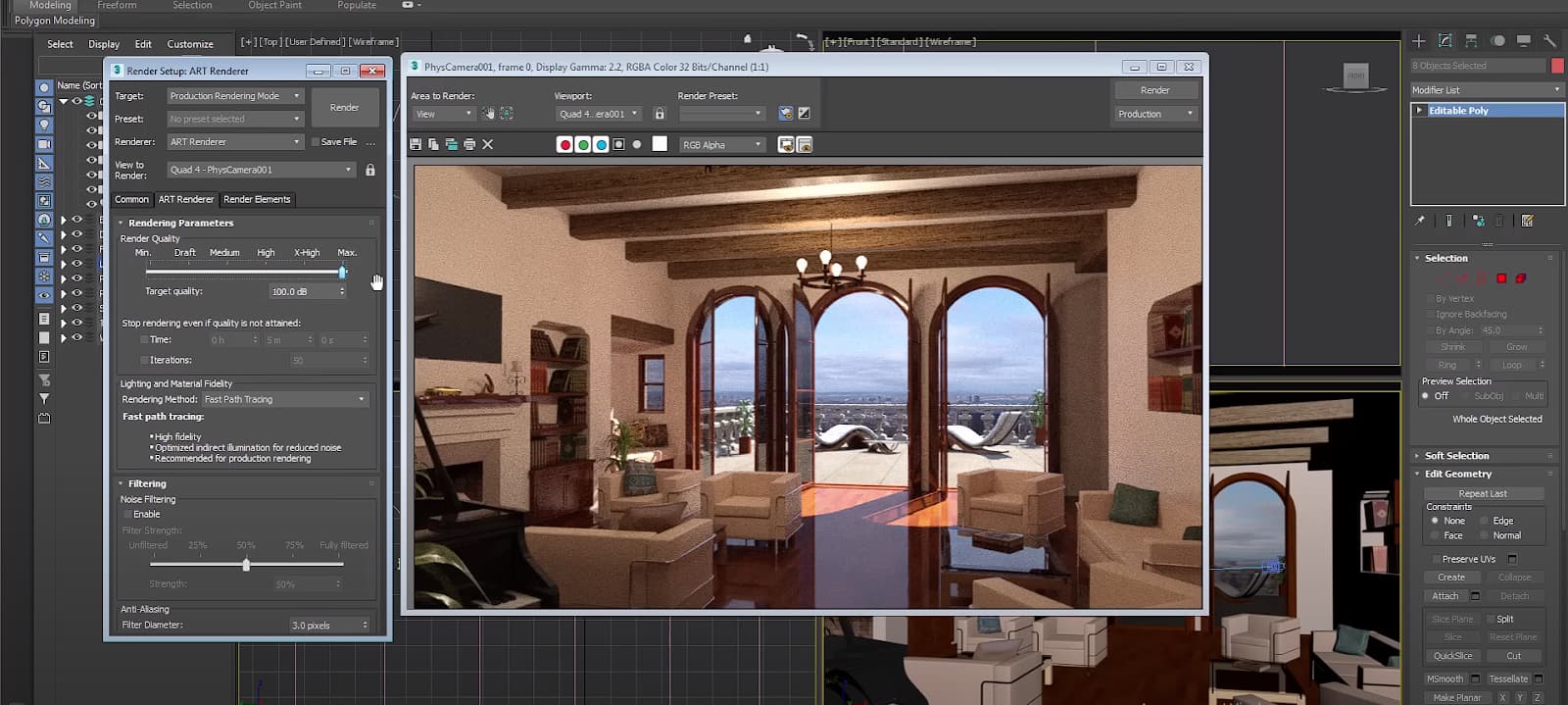


In the rapidly evolving world of digital design, 3D rendering stands as a cornerstone, transforming concepts into visual masterpieces. From…
3D rendering is a pivotal process in the fields of architecture, design, and entertainment, transforming ideas into visual realities. This…
Are you ready to embark on a journey into the captivating world of 3D visualization? Delve into an article that…
Autodesk Maya is a powerful 3D animation software used by industry professionals to create high-quality visual effects and animated graphics.